Here is an A* routine in IPython.
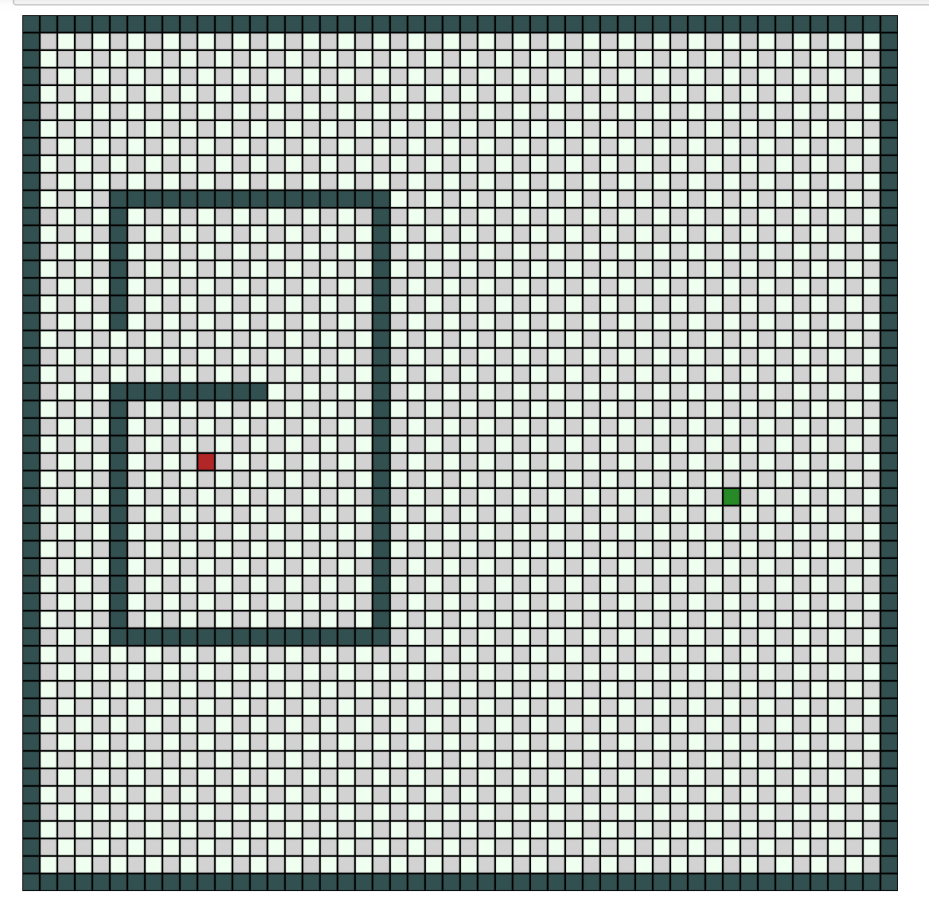
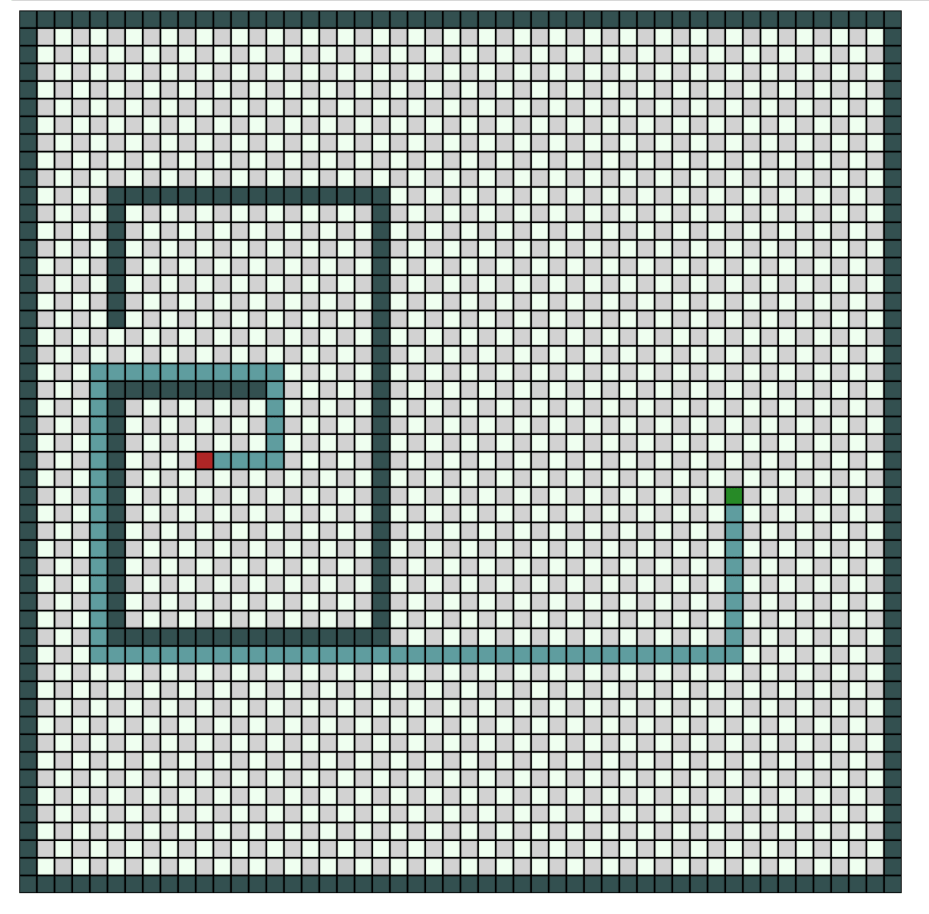
# coding: utf-8 # In[1]: from IPython.display import SVG # In[2]: CELL_SIZE = 10 GRID_SIZE = 50 # In[3]: def tosvg(tiles, border=0): import xml.etree.ElementTree as ET svg = ET.Element('svg', xmlns="http://www.w3.org/2000/svg", version="1.1", height = "500", width = "500") for tile in tiles: x,y = tile.grid_location xmin = x * CELL_SIZE xmax = (x + 1) * CELL_SIZE ymin = y * CELL_SIZE ymax = (y + 1) * CELL_SIZE p = [(xmin, ymin), (xmax, ymin), (xmax, ymax), (xmin, ymax)] point_list = " ".join(["%d,%d" % (a, b) for (a, b) in p]) ET.SubElement(svg, "polygon", fill=tile.tile_color, stroke="black", points = point_list) return ET.tostring(svg) # In[4]: class Tile: grid_location = (0,0) tile_color = 'honeydew' status = 'normal' h = 0 g = 0 f = 0 leader = None def __init__(self, loc): self.grid_location = loc self.tile_color = 'honeydew' x,y = loc loc_number = x + y if loc_number % 2 == 0: self.tile_color = 'lightgray' def set_status_barrier(self): self.status = 'barrier' self.tile_color = 'darkslategray' def set_status_origin(self): self.status = 'origin' self.tile_color = 'firebrick' return self.grid_location def set_status_target(self): self.status = 'target' self.tile_color = 'forestgreen' return self.grid_location def calculate_heuristic(self, target): tx, ty = target x, y = self.grid_location self.h = (abs(x - tx) + abs(y - ty)) # In[5]: def get_neighbors(n, open_list, closed_list, tiles): x, y = n.grid_location neighbors = [] neighbor_locations = [(x-1, y), (x+1, y), (x, y-1), (x, y+1)] for p in neighbor_locations: for tile in tiles: if p == tile.grid_location: if tile not in open_list: if tile not in closed_list: if tile.status != 'barrier': tile.g = n.g + 1 tile.leader = n neighbors.append(tile) return neighbors # In[6]: open_list = [] closed_list = [] # In[7]: tiles = [] for j in range(GRID_SIZE): for i in range(GRID_SIZE): tiles.append(Tile((i,j))) origin_location = (0, 0) target_location = (0, 0) origin_tile = None target_tile = None # In[8]: barrier_set = [] for x in range(5,21): barrier_set.append((x,10)) barrier_set.append((x,35)) for y in range(11,35): barrier_set.append((20,y)) for y in range(11,18): barrier_set.append((5,y)) for y in range(21,35): barrier_set.append((5,y)) for x in range(5,14): barrier_set.append((x,21)) for tile in tiles: x,y = tile.grid_location if (x,y) in barrier_set: tile.set_status_barrier() if (x == 0) or (x == (GRID_SIZE-1)) or (y == 0) or (y == (GRID_SIZE-1)): tile.set_status_barrier() if (x == 10) and (y == 25): origin_location = tile.set_status_origin() origin_tile = tile if (x == 40) and (y == 27): target_location = tile.set_status_target() target_tile = tile # In[9]: for tile in tiles: tile.calculate_heuristic(target_location) # In[10]: SVG(tosvg(tiles)) # In[11]: open_list.append(origin_tile) # In[12]: target_reached = False while not target_reached: for tile in open_list: tile.f = tile.g + tile.h n = open_list[0] for tile in open_list: if tile.f < n.f: n = tile if n.status == 'target': target_reached = True else: open_list.remove(n) closed_list.append(n) neighbors = get_neighbors(n, open_list, closed_list, tiles) for neighbor in neighbors: open_list.append(neighbor) # In[13]: print(n.grid_location) # In[14]: path_completed = False while not path_completed: n = n.leader if n.status == 'origin': path_completed = True else: n.status = 'path' n.tile_color = 'cadetblue' SVG(tosvg(tiles))
